Engineers at Duke University are developing a smart robotic system for sniffing out pollution hotspots and sources of toxic leaks. Their approach enables a robot to incorporate complex calculations of airflows in confined spaces made on the fly, rather than simply guide the robot to 'follow its nose'.
“Many existing approaches that employ robots to locate sources of airborne particles rely on bio-inspired educated but simplistic guesses, or heuristic techniques, that drive the robots upwind or to follow increasing concentrations,” said Michael M. Zavlanos, the Mary Milus Yoh and Harold L. Yoh, Jr. Associate Professor of Mechanical Engineering and Materials Science at Duke. “These methods can usually only localize a single source in open space, and they cannot estimate other equally important parameters such as release rates.”
But in complex environments, these simplistic methods can send the robots on wild goose chases into areas that contain no sources of the leak but where the concentrations are artificially increased by the physics of the airflows.
Read more at Duke University
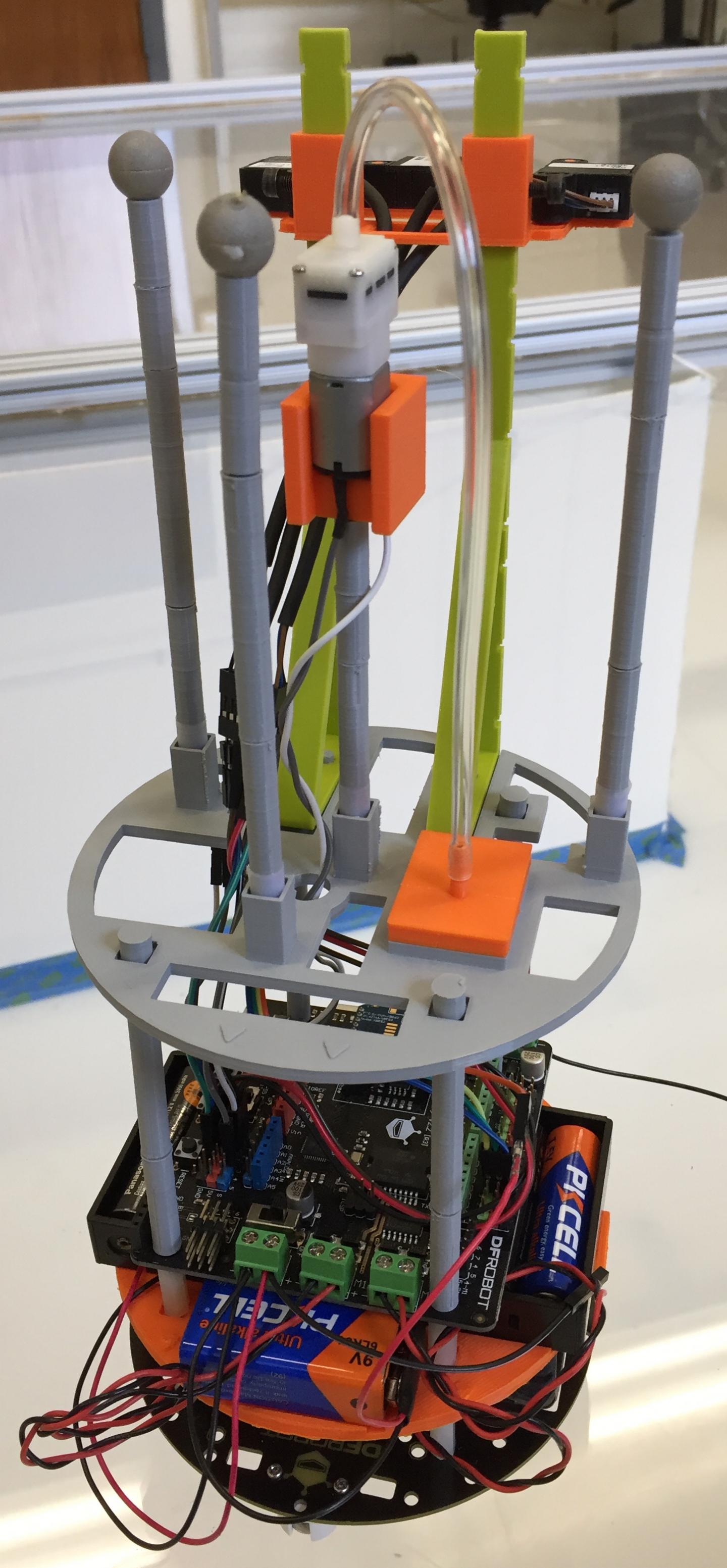
Image: This robot can out the source of an ethanol leak in a clever way. Rather than just following the strongest scent, the robot plugs measurements of concentration and airflow into a complex partial differential equation and then decides where the most useful position to take another measurement is. By repeating this process, it can find an ethanol source in just a dozen or two tries in a complex environment with multiple sources. (Credit: Reza Khodayi-mehr)